|
学习过程: Ⅰ、复习与导课 1、齿轮副的传动比 i12 =  2、蜗杆传动中蜗轮转向的判断 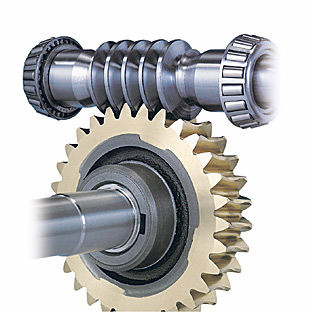 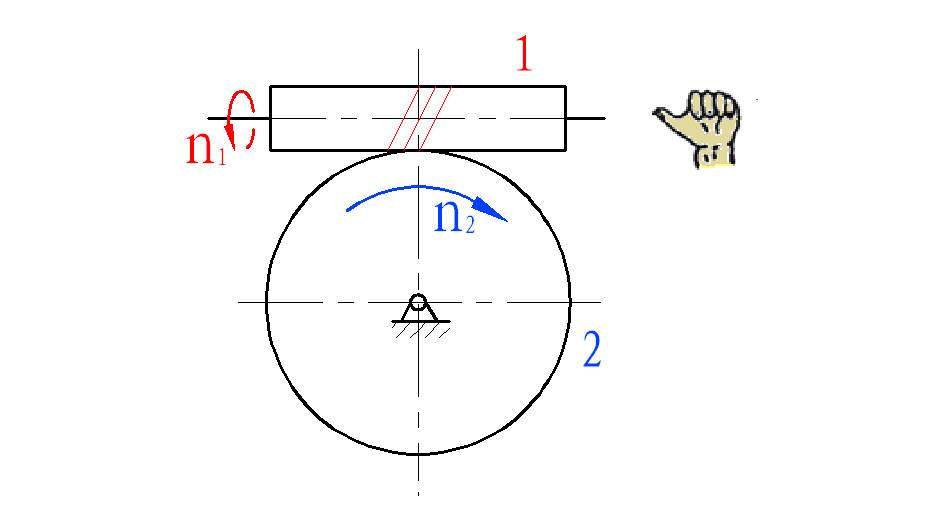
出示蜗杆传动模型,多媒体演示。 通过上次课的学习,我们知道:改变从动轮(轴)的旋转方向和速度是定轴轮系的主要功能,那么定轴轮系是如何实现变向和变速的呢?这就是我们今天要学习的内容——定轴轮系传动比的计算(导入新课) Ⅱ、教学内容——讲授新课 §6—2 定轴轮系传动比计算 一、定轴轮系的传动比 定轴轮系的传动比是指轮系中首末两轮的角速度(或转速)之比,定轴轮系传动比的计算包括:轮系传动比大小的计算、轮系中各轮旋转方向的判断;在变速机构的轮系中,还要确定末轮有多少级转速、各级转速的大小、最高转速和最低转速(即变速范围)。 (一)一对齿轮传动旋转方向的确定(多媒体、模型)
(1)外啮合: 传动比记作: i 12 =  两轮回转方向相反时,规定传动比为负值
(2)内啮合: 传动比记作: i 12 =  两轮回转方向相同时,规定传动比为正值 (3)圆锥齿轮
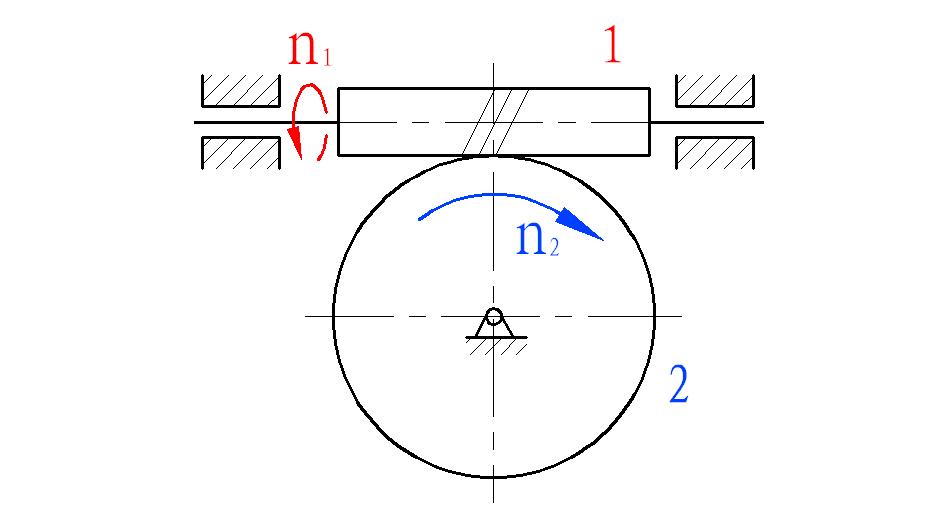 (4)蜗杆传动 (4)蜗杆传动
(5)共轴齿轮 共轴齿轮的转速相等,旋转方向相同
(6)惰轮
① 加奇数个惰轮,主、从动齿轮旋转方向一致。 加偶数个惰轮,主、从动齿轮旋转方向相反。 ② 惰轮用于改变定轴轮系的转向和调节轮轴间距离; ③ 惰轮不改变主、从动轮传动比大小。 ④ 应用实例:三星齿轮换向机构 课堂练习一:用画箭头的方法判断定轴轮系中各轮的 旋转方向,并指出哪些齿轮是惰轮?哪些齿轮是共轴齿 轮?(多媒体展出定轴轮系图)
(二)定轴轮系传动比计算 如图所示为一平行轴定轴轮系,齿轮1,2,3 ∙ ∙ ∙ 9的齿数分别为Z1,Z2,Z3 ∙ ∙ ∙ Z9,各齿轮的转速分别 为n1,n2,n3 ∙ ∙ ∙ n9,轴I为主动(输入)轴,轴Ⅱ为从 动(输出)轴,则各齿轮传动啮合顺序线为: 1—(2)—3 = 4 — 5 = 6 — 7 = 8 — 9 ● ○ ● ○ ● ○ ● ○ 其中:“●”表示主动轮 “○”表示从动轮 “( )”表示惰轮(不影响总传动i 19)。 “—”表示齿轮副 “=”表示共轴齿轮
根据啮合顺序线,可写出轮系中各对齿轮的传动比为: i 12 = i 23 =  = – = – i 45 = i 45 = = = i 67 =  = – = – i 89 = i 89 =  = – = – 且n 3 = n 4, n 5 = n 6, n 7 = n 8(三对共轴齿轮) 若以i 19表示总传动比,则i19为各级传动比的连乘 积,由此有: i 19 = i 12 i 23 i 45 i 67 i 89 = i 23 i 45 i 67 i 89 =  ∙∙∙∙ ∙∙∙∙ = (– ) ∙(–)∙ ∙(– ) ∙(–)∙ ∙(– )∙(–) )∙(–) =(—1)4∙ 即 i 19 = = (–1)4 ∙ = (–1)4 ∙ 根据上式,若有一平行轴定轴轮系,从首轮至末轮用1,2,3∙∙∙ k组成,其中外啮合圆柱齿轮对数为m,则定轴轮系总传动比的计算式为: i 1k =  = (–1) m = (–1) m  = (–1) m  (6-1 ) (6-1 ) 式中m表示轮系中外啮合圆柱齿轮副的数目。 说明:1、在平行轴定轴轮系中,当(–1)m为正值时,表示轮系首末两轮旋转方向相同;当(–1)m为负值时,表示轮系首末两轮旋转方向相反。 2、当定轴轮系中含有相交或交错轴齿轮副传动时,轮系中齿轮的旋转方向只能用箭头的方法确定,此时轮系传动比为:ilk=  = =  (三)定轴轮系任意从动轮(轴)转速计算 在定轴轮系中可以计算末轮(轴)的转速,也可以计算轮系中任意从动轮(轴)的转速,由式6-1可推导出第k个轮的转速为: n k = n 1 ∙  = n1 ∙ = n1 ∙  二、传动实例计算 例一 如图所示末端为蜗杆传动的一定轴轮系,已知Z1=Z2=18,Z3=36,Z4=20, Z5 = 40,Z6 =Z7 =Z8 =24, Z9 =2,Z10 =50,n 1=1000r/min,(1)试求总传动比i和n10。(2)若鼓轮直径D=200mm,试求重物G的移动速度v,并判断图示中重物是上升还是下降?
分析: 写出定轴轮系的啮合顺序线,分清主、从动齿轮、惰轮和共轴齿轮: 啮合线: 1—(2)—3 = 4—5 = 6—(7)—8 = 9—10 性 质:● ○ ● ○ ● ○ ● ○ 齿 数:18 36 20 40 24 24 2 50 解:(1)用画箭头的方法确定n10的旋转方向(如图所示)。 (2)列式计算总传动比为i和n10 i = = = = =  =100 =100  = 10 r / min = 10 r / min
(3)因为D=200 mm,n10=10 r/min,则有 = 6.28 m/min  根据n10的转向可确定此时重物上升。 根据n10的转向可确定此时重物上升。
例二 如图所示定轴轮系,已知Z1=26, Z2=51, Z3=42, Z4=29 ,Z5 = 49, Z6 =36, Z7 =56, Z8 =43, Z9 =30, Z10 =90,轴Ⅰ转速n1=200 r/min,试求轴Ⅳ有所少种转速?并求当Ⅲ上的三联滑移齿轮与轴Ⅱ上的齿轮4啮合时,轴Ⅳ的转速。
分析:因为轴Ⅲ上的三联滑移齿轮可以与轴Ⅱ的三个齿轮分别啮合,即5—6啮合,4—7啮合,3—8啮合,所以轴Ⅳ有三种转速。 解:写出4—7齿轮啮合时的啮合顺序线: 1— 2 = 4 — 7 = 9 — 10 ● ○ ● ○ ● ○ 列式计算: 根据i = 有: 有: n10=n1 = 200 = 200 = 17.60 r/min = 17.60 r/min 课堂练习二 试写出轴Ⅲ中另外两条啮合顺序线,并求轴Ⅳ的另 外二种转速、轴Ⅳ的变速范围。 思考题:课本P81图4-13,多刀半自动车床主轴箱 传动系统中,轴Ⅲ有多少种转速? 三、课堂小结 (一)定轴系传动比计算方法 1、 在平行轴定轴轮系中可用(—1)m 或画箭头法判断首末两 轮的旋转方向;当定轴轮系中含有相交或交错轴齿轮副传动时, 轮系中齿轮的旋转方向只能用画箭头的方法确定。 2、 根据题意,写出啮合顺序线,分清主、从动轮、惰轮和共轴 齿轮。 3、 列式计算传动比大小。 (二)点评学习效果。 四、作业布置:P 81 3、4、5 设问:当定轴轮系的末端传动为螺旋传动或齿轮齿条传动时,又将如何计算其传动比呢?这将是我们下次课将要学习的内容,希望同学们提前做好预习。请同学们课后预习§6-3 定轴轮系中任意从动轮的转速计算。(引入下一课题) |
复习齿轮副的传动比、蜗杆传动中各轮旋转方向的判断,为后面讲授定轴轮系的传动比作铺垫。 蜗杆在蜗轮的不同位置配置时,蜗轮的旋转方向会发生变化。 结论:蜗杆传动中,蜗杆、蜗轮转向间的关系取决于两者之间的相对位置、蜗杆的旋向及其旋转方向。 强调定轴轮系传动的应用和重要性 教学方法 出示齿轮传动模型、讲解各种类型的齿轮传动中主、从动齿轮的旋转关系和方向,多媒体展示简图,分析得出结论。 规定:箭头指向为齿轮可见侧的圆周速度方向。 箭头指向的含义: 同向箭头:齿轮转向相同 反向箭头:齿轮转向相反 出示一对外啮合齿轮传动模型,让学生动手判断主、从动轮之间的旋转关系,分析得出结论 结论:i 12为 -,两齿轮转向相反,箭头指向相反 出示一对内啮合齿轮传动模型,让学生动手判断主、从动轮之间的旋转关系,并与外啮合齿轮传动进行比较,分析得出结论。 结论:i 12为 +,两齿轮转向相同,箭头指向相同 “+”一般省略不标 出示圆锥齿轮传动模型,找出啮合点,明确主、从动轮旋转方向与啮合点的关系。 结论:箭头同时指向或同时背离啮合点 用左(右)手法则判定 结论:蜗轮的回转方向取决于蜗杆轮齿的螺旋方向和蜗杆的回转方向 思考题: 重物是上升还是下降? 强调平行轴定轴轮系,为后面分析作铺垫。 重点讲解齿轮传动啮合顺序线,注意理解各符号的含义。 齿轮传动啮合顺序线是学习定轴齿轮传动比的一把钥匙,在教学过程中要重点讲授。 正确写出啮合顺序线,可以清楚齿轮传动之间的传动关系,可以化简为易,并减少出错,有利于正确写出传动比的计算公式。 教学中要突出啮合顺序线这条主线。 老师讲授: i19为各级传动比的连乘积,惰轮不影响总传动比的大小。 多媒体演示推导过程。 逻辑分析和推导得出定轴轮系传动比的计算公式。推导过程可以略讲,重点讲解定轴轮系总传动比的计算公式中: 首末两轮的转速比与总传动比的关系,各级齿轮副中主、从动轮齿数的连乘积之比与总传动比之间的关系。 归纳定轴轮系传动比计算公式的应用。 用符号法判断仅适用平行轴定轴轮系,重点讲解m的含义。 归纳: 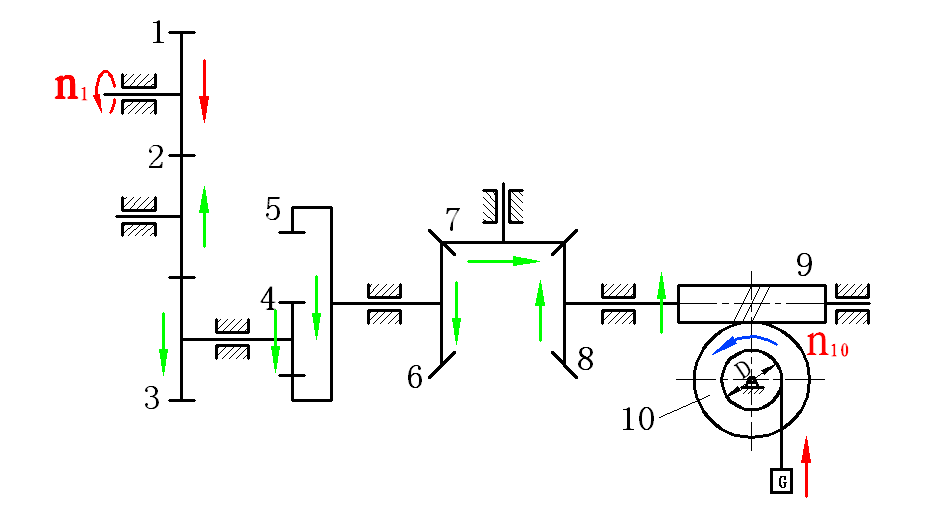 符号判断法 符号判断法
平行轴定轴轮系 箭头判断法  相交轴定轴轮系 相交轴定轴轮系
箭头判断法 交错轴定轴轮系 解题方法: (1) 判断轴Ⅳ的转速级数 Ⅰ–Ⅱ 1–2 i有一种  Ⅱ–Ⅲ 4–6 Ⅱ–Ⅲ 4–6
4–7 i有3种 4–8 Ⅲ–Ⅳ 9–10 i有一种 ∴ 轴Ⅳ的转速级数为: 1×3×1=3 (2)写出啮合顺序线,判断主、从动轮和共轴齿轮; (3)书写公式,代入数值, 计算结果并注意单位。 分别让两位同学在黑板上演示:一位写出定轴轮系的啮合顺序线,标明主、从动轮、共轴齿轮和各轮齿数;另一位解题;老师作巡回辅导,检查教学效果。 课堂练习二检查学生对齿轮传动啮合顺序线的和定轴轮系传动比计算公式的理解与应用。 思考题中注意理解i总为 各级传动比的连乘积 出示多媒体归纳,老师口叙。 承前启后,引入下一课题。 |
|
|